
Masinaehituse ja seadmete ohutuse käsitluses lähtutakse riskipõhisest lähenemisest: esmalt tuvastatakse võimalikud ohud, seejärel hinnatakse nendega seotud riskid ning valitakse sobivad meetmed riskide vähendamiseks. Praktikas tähendab see, et nii projekteerimise, paigalduse, kasutuse kui ka hoolduse etappides hinnatakse masina või seadme kasutusviise ja väärkasutuse võimalusi ning kirjeldatakse meetmed, millega ohtlikud olukorrad välditakse või viakse aktsepteeritavale tasemele.
Ohutuse tagamisel eelistatakse tehnilisi lahendusi, mis kõrvaldavad ohu juba konstruktsioonis. Kui ohtu ei ole võimalik konstruktsiooniga täielikult eemaldada, rakendatakse kaitsemeetmeid (näiteks kaitsepiirded, kaitsekatted, lukustused ja juhtimissüsteemi funktsioonid), ning viimases järjekorras toetutakse kasutajale suunatud meetmetele (hoiatused, märgistused, kasutusjuhised ja koolitus). Oluline on, et valitud meetmed oleksid põhjendatud riskihindamise tulemustega ja oleksid kooskõlas masina kavandatud kasutusega.
Dokumentatsioon peab toetama ohutut kasutust: kasutus- ja hooldusjuhendis kirjeldatakse selgelt töörežiime, piiranguid, jääkriske ning nõutavaid töövõtteid. Samuti tuleb määratleda hooldustoimingute ohutu teostamine, sh seadme seiskamise ja energiavabastuse põhimõtted, et vältida ootamatut käivitumist või ohtlike liikumiste teket. Vajadusel tuuakse välja nõuded isikukaitsevahendite kasutamiseks, kuid neid käsitletakse täiendava meetmena, mitte esmase riskivähendusena.
Riskijuhtimine ei ole ühekordne tegevus: seadme muudatuste, ümberseadistuste, tootmisprotsessi muutuste või uute töövõtete kasutuselevõtul tuleb riskihindamine üle vaadata ja ajakohastada. Samuti on praktikas oluline koguda kasutuskogemust (nt intsidentidest, rikketest ja hooldusandmetest) ning viia parendused sisse nii tehnilistesse lahendustesse kui ka töökorraldusse.
Kõige ohtlikumad otsused masinaohutuse valdkonnas on need, mis tehakse veendumusega, et küsimus on „lõplikult“ lahendatud.
Projekti käigus ilmneb oht. Keegi pakub kiiret sammu: paneme juurde kaitsekatte, paigaldame valguskardina, teeme juhtimises ohutusfunktsiooni. Tundub, et asi on tehtud. Dokumentatsioonis on kaitsemeede kirjas, riskihindamise tabelis number langeb ja liigutakse edasi.
Hiljem selgub aga, et:
- raske kaitsekate tekitab uue muljumistsooni,
- lukustus raskendab ligipääsu seadistustele ja soodustab möödahiilimist,
- kaitseseadis on paigaldatud ilma tegeliku seiskumisaja kontrollita,
- lisakomponent ohutusahelas muutis süsteemi dünaamikat viisil, mida keegi ei analüüsinud.
Need ei ole vead teadmatusest.
Need on vead liigsest lihtsustamisest.
Kaitsemeede on konstruktsiooniline muudatus. See muudab masina geomeetriat, ruumi kättesaadavust, kasutusviisi, häireolukorras tegutsemise loogikat, ajamisüsteemi käitumist ja juhtimise reageerimist. Iga selline muudatus mõjutab ohtude struktuuri — mõnikord ilmselgelt, mõnikord väga märkamatult.
Tööstuspraktikas kohtab sageli lineaarset mõtlemist: oli oht A → lisasime kaitse → oht A „kadus“. Tegelikkus on aga mittelineaarne. Muutus ühes kohas võib nihutada riski teise, vähem nähtavasse piirkonda.
Just see ala — kus kaitse ei stabiliseeri süsteemi, vaid tekitab uusi tehnilisi pingeid — vajab kainet, insenerlikku analüüsi.
Esimene viga, mis „kaitse lisamise“ järel sageli tehakse, on eeldus, et muudatus on lokaalne. Et see puudutab ainult üht ohtu ega mõjuta ülejäänud süsteemi.
Tegelikkuses iga kaitsemeede sekkub masina konstruktsiooni või selle juhtimisse. See tähendab, et sekkumine puudutab:
- kinemaatikat,
- tööruumi ligipääsetavust,
- reaktsiooniaegu,
- seadistus- ja hooldustoimingute tegemise viisi,
- häiretele reageerimise viisi.
Kui neid muudatusi ei hinnata tervikuna, tekib väga kergesti riskinihe.
1. Kaitsepiire kui uute mehaaniliste ohtude allikas
Kõige klassikalisem näide on mehaaniline kaitsepiire. Selle eesmärk on selge: piirata juurdepääsu ohualale. Sageli täidab see ülesannet tõhusalt.
Probleem algab siis, kui projekteerimisel keskendutakse ainult eraldamisele, arvestamata kaitsepiirde enda füüsikalisi omadusi.
Raske ülespööratav kaitsepiire on lisamass.
Lisamass tähendab potentsiaalset energiat.
Potentsiaalne energia tähendab võimalust alla vajuda, tekitada muljumist või lööki.
Kui ei ole analüüsitud kaitsepiirde liikumisteed, selle toestust ning stabiilsust avatud ja suletud asendis, muutub kaitsemeede süsteemis uueks liikuvaks osaks. Ja sellega tekivad ka piirde enda ohutsoonid.
Praktikas näeb see välja lihtsana: operaator avab kaitsepiirde, hoiab seda ühe käega, teisega ulatub tööalasse, ning keegi kõrval riivab piiret. Või hakkab hing pärast aastast kasutust loksuga tööle. Sellisel juhul lakkab kaitsepiire olemast „barjäär“ ja muutub dünaamiliseks elemendiks.
See ei ole üksik erand.
See on otsene tagajärg sellele, et jäetakse arvestamata: ka kaitsemeede ise võib olla energia ja liikumise allikas.
2. Kaitsefunktsioon ilma ohutusparameetrite kontrollita
Praktikas kohtab sageli mustrit: paigaldame turvavalguskardina, ühendame selle ohutuskontrollerisse, määrame vahemaa „kataloogi järgi“ ja loeme teema lõpetatuks.
Ainuüksi kaitseseadise kasutuselevõtt ei tõenda aga veel, et risk on tegelikult piisavalt vähendatud.
Reaalsest tõhususest saab rääkida alles siis, kui on täidetud vähemalt kolm tehnilist eeltingimust.
a) Tegeliku seiskamisaja verifitseerimine
Kaitseseadise kaugust ohualast ei tohi määrata „kogemuse järgi“. See peab tulenema arvutustest vastavalt ISO 13855-le, mis lähtuvad:
- masina tegelikust seiskamisajast (koos süsteemi inertsiga),
- kaitseseadise ja juhtimisahela reageerimisajast,
- inimese reaktsiooniajal,
- seadme tüübist tulenevatel püsivatel geomeetrilistel parameetritel.
Võtmesõna: tegelik.
Seiskamisaja väärtus tuleb määrata mõõtmisega, tingimustes, mis esindavad halvima juhtumi olukorda: maksimaalse koormuse juures, suurima kiiruse juures ning arvestades muutusi ajas (pidurduskomponentide kulumine, tolerantsid, temperatuur). Mitte kataloogiväärtus. Mitte deklaratsioon. Mitte „tüüpiline”.
Kui seda mõõtmist ei ole tehtud, puudub tõendus, et ohutuskaugus on valitud korrektselt. Ja ilma korrektse ohutuskauguseta puudub tõendus, et kaitse seade takistab reaalselt ohtlikku tsooni jõudmist enne liikumise seiskumist.
Sellises olukorras võib kaitse toimida loogiliselt korrektselt, kuid füüsiliselt olla ebatõhus.
b) Ohutusfunktsiooni ja Performance Level’i verifitseerimine
Teine element on ohutusfunktsiooni verifitseerimine vastavalt ISO 13849-1 nõuetele.
Kaitseseade on vaid üks osa ahelast. Ohutusfunktsioon hõlmab:
- andurit (nt valguskardinat),
- loogikaosa (ohutusjuhtseadet, releesid),
- täitur- ja katkestuselemente (kontaktorid, ventiilid, ajamid),
- arhitektuuri struktuuri (kategooria),
- töökindlusparameetreid (MTTFd, DC, CCF).
Kui Performance Level’i arvutusi ei ole tehtud ja ei ole tõendatud, et saavutatud PL ≥ nõutav PLr, mis tuleneb riskihindamisest, siis formaalselt puudub kinnitus, et ohutusfunktsioon tagab nõutud riskivähenduse taseme.
Levinud viga on eeldus: „valguskardin on PL e, järelikult on kõik ohutu”.
Nõutud taset ei pea täitma üksnes valguskardin.
Selle peab täitma kogu ohutusfunktsioon.
Kui seiskamisahel sisaldab liiga madala töökindlusega elementi, näiteks üksikut kontaktorit ilma jälgimiseta, või puudub diagnostika, võib tegelik PL olla nõutust madalam. Sellisel juhul on kaitsemeetme tõhusus eeldus, mitte fakt.
c) Funktsionaalne kooskõla — mitte ainult elektriline
Kolmas valdkond on ohutusfunktsiooni integreerimine tehnoloogilise protsessiga.
Isegi korrektselt arvutatud ohutuskaugus ja nõuetekohaselt kontrollitud Performance Level ei taga lahenduse toimivust, kui:
- reset on võimalik kohast, mis võimaldab uuesti pääseda ohtutsooni,
- taaskäivitus toimub automaatselt pärast kaitseseadise vabastamist,
- üleminekuseisundeid ei ole arvesse võetud (nt jääkliikumine, telgede inerts),
- süsteemi käitumist osalise rikke korral ei ole kontrollitud.
Ohutusfunktsioon ei tohi olla pelgalt „ühendatud“ — see peab olema loogiliselt korrektne ning valideeritud kogu masina tööstsenaariumis.
Kui mõni neist elementidest (seiskamisaeg, ISO 13855 järgi määratud kaugus, PL/PLr vastavalt ISO 13849-1-le, reset’i ja taaskäivituse loogika) ei ole sisuliselt ja usaldusväärselt verifitseeritud, siis puudub meil kinnitus, et risk on tegelikult tõhusalt vähendatud.
Ja probleem on sügavam.
Sellises olukorras ei ole mitte ainult kaitsemeetme tõhusus tõendamata. Juba projekteerimise etapis tekitame uusi ohusituatsioone. Operaator saab signaali, et ala on kaitstud. Käitumine muutub — lähenetakse kiiremini, hoitakse väiksemat vahemaad, tegutsetakse otsustavamalt. Kui aga tegelik seiskamisaeg on pikem kui projektis eeldati, tekib olukord, kus inimene jõuab ohu mõjupiirkonda enne, kui ohtlik liikumine on peatunud.
See on standardite mõistes ohusituatsioon: olukord, kus isik on eksponeeritud vähemalt ühele ohule.
Sarnane loogika kehtib ka valesti verifitseeritud Performance Level’i korral: kui ohutusfunktsioon ei saavuta nõutud PLr-i, võib üksikrike või diagnostika kadumine viia seiskamisfunktsiooni kadumiseni. Siis on tegemist olukorraga, kus:
- oht on endiselt olemas,
- inimene eeldab, et oht on vähendatud,
- kuid süsteem ei täida ohutusfunktsiooni kavandatud viisil.
See ei ole „puudulik dokumentatsioon“.
See on projekteerimise käigus struktuurselt uus ohusituatsioon.
3. Kui kaitse muudab tööviisi — ja koos sellega riski struktuuri
Iga kaitsemeede ei muuda üksnes masina geomeetriat või seiskamisparameetreid. See muudab ka töö tegemise viisi.
Just siin tekivad praktikas kõige sagedamini uued ohuolukorrad — mitte seetõttu, et kaitse seadmena „ei tööta“, vaid seetõttu, et lahendus ei ole arvestanud, kuidas seda tegelikult igapäevases töös kasutatakse.
a) Piiratud ligipääs = improviseeritud sekkumine
Kui kaitsepiire või kate teeb seadistamise, puhastamise või ümberseadistamise ligipääsu oluliselt ebamugavaks, hakkab operaator paratamatult protseduure lühendama:
- jätab kaitse osaliselt avatuks,
- tõkestab piirlüliti töö,
- teeb toiminguid jääkliikumiste ajal,
- sekkub olukorras, kus seiskumine ei ole kindel.
See ei ole „distsiplineerimatu töötaja“ küsimus.
See on projekteerimisotsuse tagajärg, mis ei ole arvestanud konkreetse tööülesande tegeliku sageduse ja iseloomuga.
Sellest tekib ohuolukord: inimene viibib alas, mis algse eeldusena pidi liikumise ajal olema ligipääsmatu, kuid süsteem ei suuda enam ohutuid tingimusi reaalselt jõustada.
Kaitset ei ole eemaldatud.
Protsessi on kujunenud sisuline möödahiilimine.
b) Kaitse, mis lõhub töö loogika ja rütmi
Iga ohutusfunktsioon seab tööle loogilised tingimused:
- seiskumine rikkumise korral,
- käivitustõkestus,
- lähtestus,
- algtingimuste kinnitamine.
Kui töö taastamise järjestus on liiga keeruline, ebaloogiline või kasutajale ebaselge, suureneb tõenäosus, et toiminguid tehakse väljaspool ettenähtud stsenaariumi.
Näiteks:
- lähtestus ilma tsooni visuaalse kontrollita,
- taaskäivitamine jääkliikumiste olemasolul,
- sekkumine hooldusrežiimis ilma energia täieliku väljalülitamiseta.
Igaüks neist juhtumitest on ohuolukord: inimene viibib ohuteguri mõjualas olukorras, kus ohutustingimused ei ole täidetud.
Riskihindamise vaatenurgast ei ole see „kasutaja viga”.
Tegemist on puuduliku analüüsiga selle kohta, kuidas kaitsemeede muutis süsteemi dünaamikat.
c) Ohutuse ja ergonoomika konflikt
Kui kaitsemeede:
- piirab tööala nähtavust,
- sunnib ebaloomulikele tööasenditele,
- suurendab füüsilist koormust,
- pikendab tsükliaega viisil, mis on tootmise seisukohalt märkimisväärne,
siis suureneb soovimatute käitumiste tõenäosus.
Tõenäosuse kasv on aga üks kahest riskimääratluse komponendist.
Praktikas näeb see välja nii:
Lahendus eeldab ohutut juurdepääsu suletud kaitsekattega.
Operaator peab detaili nägemiseks kummarduma ja libistab käe alumise serva alt sisse.
Kaitse on füüsiliselt olemas.
Ohuolukord tekib siiski.
Kaitsemeede ei kõrvaldanud riski.
See muutis riski ülesehitust.
4. Lineaarne mõtlemine versus süsteemne analüüs
Kõigil kirjeldatud juhtudel on ühine põhjus: riskivähenduse käsitlemine lineaarselt.
Ohutegur → kaitsemeede → probleem on lahendatud.
Tegelikult tuleb igat tehnilises süsteemis tehtud konstruktsioonilist muudatust käsitleda kui süsteemi uut konfiguratsiooni.
Uus konfiguratsioon tähendab:
- uusi töötingimusi,
- uusi juurdepääsupunkte,
- uusi liikumistrajektoore,
- uusi häire- ja kõrvalekaldestsenaariume,
- uued ohuolukorrad.
Kui projekteerimine ei pöördu pärast kaitsemeetme rakendamist tagasi ohtude tuvastamise juurde, jääb riskianalüüs sisuliselt ebatäielik — isegi siis, kui dokumentatsioon näeb vormiliselt korrektne välja.
See ongi põhimõtteline vahe „kaitse olemasolu” ja tegeliku riskivähenduse vahel.
5. Miks sisemiselt ohutud lahendused on stabiilsemad
Kui vaadata kainelt projekteerimisvigade mustreid, joonistub välja selge seaduspära: kõige rohkem probleeme tekib siis, kui ohutus „lisatakse juurde”, mitte ei kavandata algusest peale konstruktsiooni osaks.
Olemuslikult ohutud konstruktsioonilahendused toimivad teistmoodi kui kaitsemeetmed. Need ei piira üksnes ligipääsu ohule, vaid vähendavad või kõrvaldavad ohu enda selle tekkekohas.
Näited on lihtsad:
- kineetilise energia vähendamine kiiruse või massi piiramise kaudu,
- pöördemomendi piiramine kokkupõrke korral ohutule tasemele,
- survejõu vähendamine,
- servade ümardamine nende katmise/varjestamise asemel,
- geomeetria muutmine nii, et muljumiskoht (näpistus-/muljumispunkt) kaob,
- ajami kasutamine, mille peatumiskäitumine on kontrollitava iseloomuga.
Sellistel juhtudel risk väheneb, sest ohuolukorras kättesaadav energia väheneb või kaob selle vabanemise mehhanism.
See on kvalitatiivselt teistsugune riskivähendus kui lihtsalt tõkke lisamine.
Kui vähendad kiirust, vähendad energiat kõikides stsenaariumides.
Kui vähendad jõudu, vähendad võimaliku kahju raskust.
Kui kõrvaldad geomeetriast muljumiskoha, lakkab eksisteerimast konkreetne kahju tekkimise mehhanism.
Paljudel juhtudel ei ole siis vaja ohutust „ehitada” juurde täiendava juhtloogika, lähtestuste ja keerukate järjestuste abil. Risk väheneb struktuurselt.
Seetõttu on need lahendused oma olemuselt stabiilsemad.
6. Kas olemuslikult ohutud lahendused võivad tekitada uusi ohuolukordi?
Võib küll. Kuid mehhanism on teistsugune – ja enamasti harvemini esinev.
Näide: protsessis vähendatakse liikumiskiirust või jõudu ning selle tulemusel tekib rohkem häireid (libisemised, detaili nihkumine, sagedasemad kinnikiilumised). Selle tagajärjel kasvab käsitsi sekkumiste arv. Käsitsi sekkumiste sagenemine tähendab omakorda rohkem hetki, mil inimene satub ohu mõjuvälja – ehk tekivad uued ohuolukorrad.
See ei ole konstruktsiooni otsene „kõrvalmõju“.
See on protsessi stabiilsuse ja sekkumissageduse muutuse tagajärg.
Erinevus seisneb aga selles, et olemuslikult ohututes lahendustes puudutab muutus energiaallikat või geomeetriat, mitte pelgalt ligipääsu. Seetõttu on uute ohuolukordade hulk tavaliselt väiksem kui hiljem lisatud kaitsemeetmete puhul.
7. Põhimõtteline erinevus
Kaitsemeede ütleb:
„Oht on olemas – piirame sellele ligipääsu.“
Olemuslikult ohutu lahendus ütleb:
„Muudame ohtu või kõrvaldame selle.“
Esimene lähenemine loob tingimused.
Teine muudab süsteemi füüsikat.
Seetõttu on projekteerimispraktikas kõige turvalisem alustada energia vähendamisest, geomeetria muutmisest ja ohu mehhanismi kõrvaldamisest ning alles seejärel – kui see on vajalik – rakendada tehnilisi ja täiendavaid kaitsemeetmeid.
See ei ole filosoofia küsimus.
See on stabiilsuse küsimus.
8. Uued ohud on protsessi osa. Neid ei tohi eirata.
Nn „sekundaarriskide“ peamine probleem on see, et neid käsitletakse tühise asjana. Nagu väikese ebamugavusena pärast kaitsemeetme kasutuselevõttu. Nagu millegi sellisena, mida saab „hiljem täpsustada“.
Tegelikult ei ole see riskihindamise metoodika vaates detail.
See on protsessi kriitiline hetk.
Iga kaitsemeetme kasutuselevõtt muudab süsteemi konfiguratsiooni. Konfiguratsiooni muutus tähendab aga võimalust, et tekivad uued ohuolukorrad.
Kui pärast riski vähendamist ei pöörduta tagasi ohtude tuvastamise juurde, on protsess katkestatud. See ei ole lõpetatud – see jääb sisuliselt lahtiseks.
Praktikas tekib just siinkohal sageli „auk“: oht A on formaalselt vähendatud, kuid selle asemel ilmub oht B – vähem ilmne, raskemini märgatav ning tihti seotud kasutamise, lähtestamise, juurdepääsu ja seiskamise dünaamikaga.
Selle sammu eiramine tähendab, et riski vähendamine jääb paratamatult osaliseks.
9. Iteratsioon, mida ei saa lihtsalt „läbi klõpsata“
Seetõttu peab korrektselt üles ehitatud riski vähendamise protsessis pärast iga etappi kõlama üks konkreetne küsimus:
Kas rakendatud kaitsemeetmete tulemusel tekkis uus oht?
Kui vastus on „jah“ – analüüs liigub tagasi ohtude tuvastamise juurde.
Kui vastus on „ei“ – peab see olema teadlik otsus, mitte vaikimisi „edasi“.
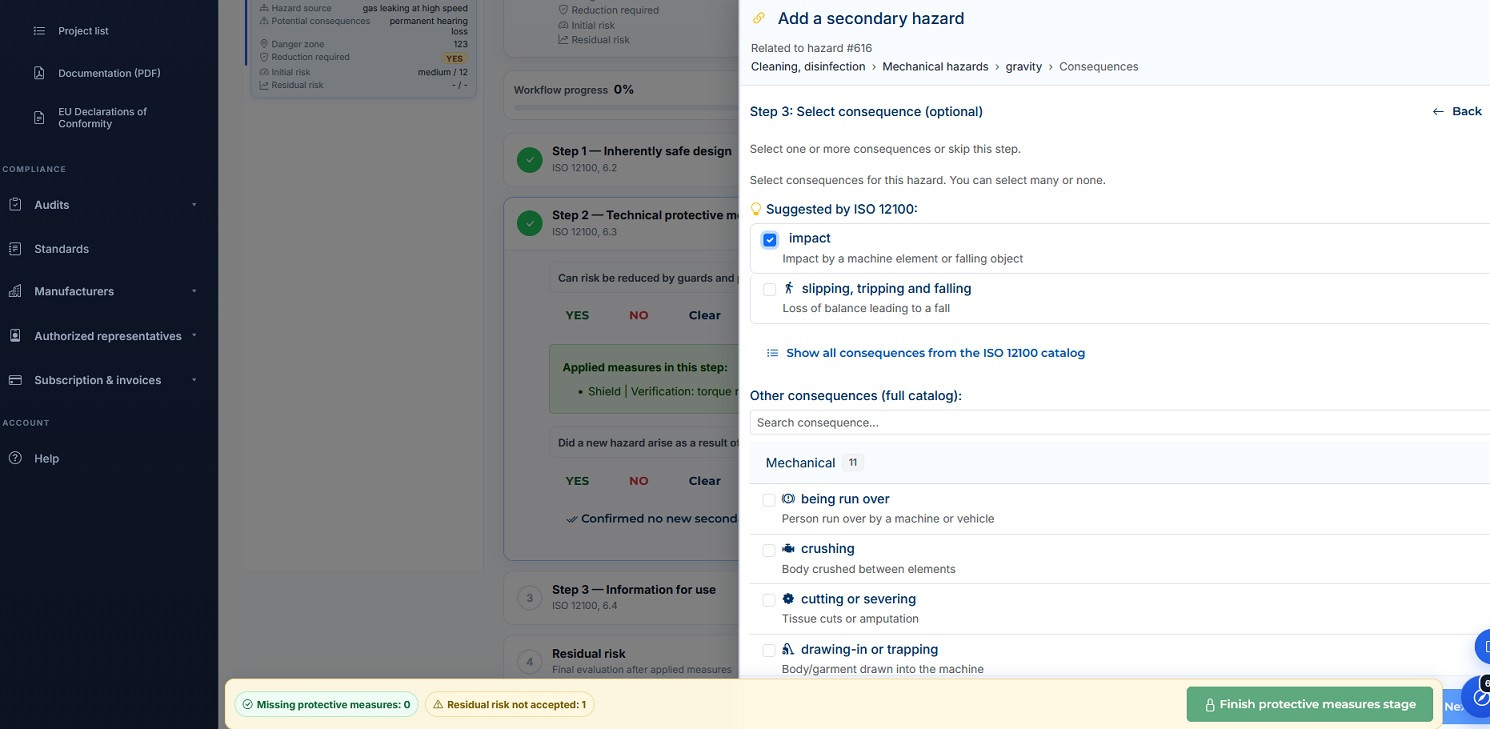
Täpselt seda mehhanismi jälgib SafetySoftware.eu süsteemis otse: pärast riski vähendamise etappi sunnib rakendus tegema otsuse, kas valitud kaitsemeetmed on tekitanud uusi ohte. Ilma selge seisukohata ei lase ta protsessiga edasi minna.
See ei ole kosmeetiline lisavidin.
See on protsessi kaitse lineaarseks „lihtsustamiseks“ muutumise vastu.
Sest suurimad vead ei teki kaitsemeetmete puudumisest.
Need tekivad iteratsiooni puudumisest.
Masinaohutus algab täpselt seal, kus lõpeb mõtteviis: „lisasime kaitse, järelikult oleme ohutud“.